
M2QA0.37-2P M2QA0.55-2P M2QA0.75-2P M2QA1.1-2P
M2QA1.5-2P M2QA2.2-2P M2QA3-2P M2QA4-2P
M2QA5.5-2P M2QA7.5-2P M2QA11-2P M2QA15-2P
M2QA18.5-2P M2QA22-2P M2QA30-2P M2QA37-2P
M2QA45-2P M2QA55-2P M2QA75-2P M2QA90-2P
M2QA110-2P M2QA132-2P M2QA160-2P M2QA200-2P
M2QA250-2P M2QA315-2P M2QA0.25-4P M2QA0.37-4P
M2QA0.55-4P M2QA0.75-4P M2QA1.1-4P M2QA1.5-4P
M2QA2.2-4P M2QA3-4P M2QA4-4P M2QA5.5-4P M2QA7.5-4P
M2QA11-4P M2QA15-4P M2QA18.5-4P M2QA22-4P
M2QA30-4P M2QA37-4P M2QA45-4P M2QA55-4P M2QA75-4P
M2QA90-4P M2QA110-4P M2QA132-4P M2QA160-4P
M2QA200-4P M2QA250-4P M2QA315-4P M2QA0.18-6P
M2QA0.25-6P M2QA0.37-6P M2QA0.55-6P
M2QA0.75-6P M2QA1.1-6P M2QA1.5-6P M2QA2.2-6P
M2QA3-6P M2QA4-6P M2QA5.5-6P M2QA7.5-6P
M2QA11-6P M2QA15-6P M2QA18.5-6P M2QA22-6P
M2QA30-6P M2QA37-6P M2QA45-6P M2QA55-6P
M2QA75-6P M2QA90-6P M2QA110-6P M2QA132-6P
M2QA160-6P M2QA200-6P M2QA250-6P
M2QA0.18-8P M2QA0.25-8P M2QA0.37-8P M2QA0.55-8P
M2QA0.75-8P M2QA1.1-8P M2QA1.5-8P M2QA2.2-8P
M2QA3-8P M2QA4-8P M2QA5.5-8P M2QA7.5-8P
M2QA11-8P M2QA15-8P M2QA18.5-8P M2QA22-8P
M2QA30-8P M2QA37-8P M2QA45-8P M2QA55-8P
M2QA75-8P M2QA90-8P M2QA110-8P M2QA132-8P
M2QA160-8P M2QA200-8P

M2QA71M2A M2QA71M2B M2QA80M2A M2QA80M2B
M2QA90S2A M2QA90L2A M2QA100L2A M2QA112M2A
M2QA132S2B M2QA160M2A M2QA160M2B M2QA160L2A
M2QA160L2B M2QA180M2A M2QA200L2A M2QA200L2B
M2QA225M2A M2QA250M2A M2QA280S2A M2QA280M2A
M2QA315S2A M2QA315M2A M2QA315L2A M2QA315L2B
M2QA355M2A M2QA355L2A
M2QA71M4A M2QA71M4B M2QA80M4A M2QA80M4B
M2QA90S4A M2QA90L4A M2QA100L4A M2QA112M4A
M2QA132S4B M2QA160M4A M2QA160M4B
M2QA160L4A
M2QA160L4B M2QA180M4A M2QA200L4A M2QA200L4B
M2QA225M4A M2QA250M4A M2QA280S4A M2QA280M4A
M2QA315S4A M2QA315M4A M2QA315L4A M2QA315L4B
M2QA71M6A M2QA71M6B M2QA80M6A M2QA80M6B
M2QA90S6A M2QA90L6A M2QA100L6A M2QA112M6A
M2QA132S6B M2QA160M6A M2QA160M6B M2QA160L6A
M2QA160L6B M2QA180M6A M2QA200L6A M2QA200L6B
M2QA225M6A M2QA250M6A M2QA280S6A M2QA280M6A
M2QA315S6A M2QA315M6A M2QA315L6A M2QA315L6B
M2QA355M6A M2QA355L6A
M2QA71M8A M2QA71M8B M2QA80M8A M2QA80M8B
M2QA90S8A M2QA90L8A M2QA100L8A M2QA112M8A
M2QA132S8B M2QA160M8A M2QA160M8B M2QA160L8A
M2QA160L8B M2QA180M8A M2QA200L8A M2QA200L8B
M2QA225M8A M2QA250M8A M2QA280S8A M2QA280M8A
M2QA315S8A M2QA315M8A M2QA315L8A M2QA315L8B
M2QA355M8A M2QA355L8A
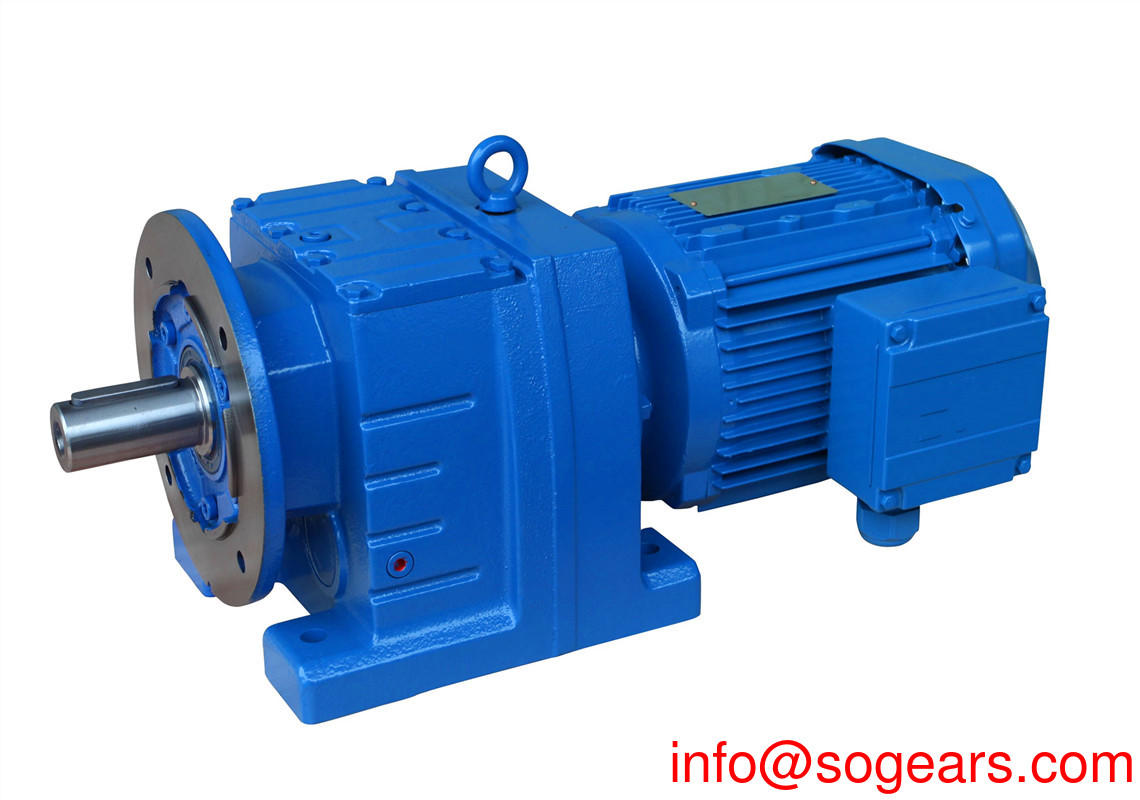
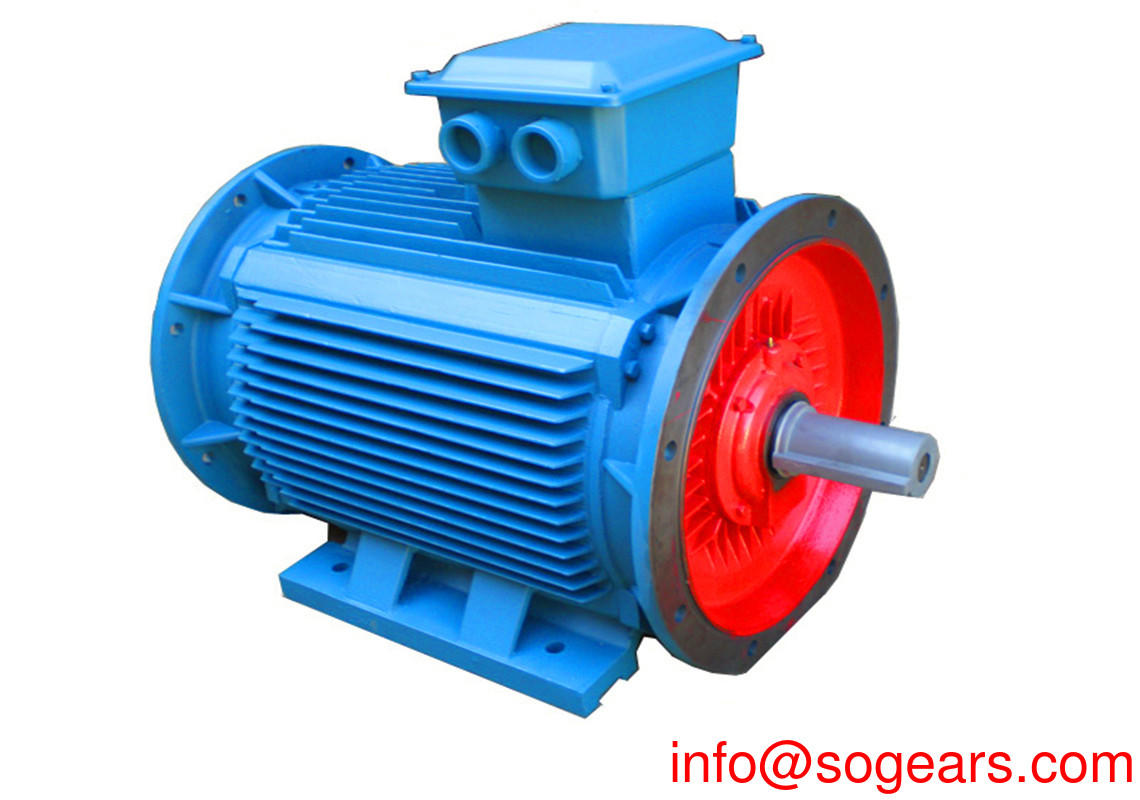
มอเตอร์แบบอะซิงโครนัสสามเฟสทางทะเลซีรี่ส์ M2QA เป็นอุปกรณ์เครื่องจักรกลทางทะเลรุ่นล่าสุดในซีรี่ส์ M2000 ของ ABB Motor Company เปลือกนอกทำจากเหล็กหล่อความแข็งแรงสูงเพื่อหลีกเลี่ยงความเสียหายรอง หลังจากการออกแบบพิเศษและการผลิตที่มีประสิทธิภาพสูงแรงบิดเริ่มต้นและข้อดีอื่น ๆ เหมาะสำหรับไดรฟ์เครื่องจักรทางทะเลทุกชนิดเช่น: ปั๊ม, พัดลม, ตัวคั่น, เครื่องจักรไฮดรอลิก, อุปกรณ์เสริมและความต้องการที่คล้ายกันของอุปกรณ์ทางทะเลอื่น ๆ มอเตอร์ได้รับการออกแบบอย่างเข้มงวดตาม GB755 "การจัดอันดับมอเตอร์หมุนและประสิทธิภาพ" และ ZC "รหัสสำหรับการก่อสร้างของเรือเดินทะเลเหล็ก" และได้รับการอนุมัติจากสำนักงานตรวจสอบเรือของรัฐและได้รับประเภทสมาคมการจำแนกประเภทจีน ใบรับรองการอนุมัติ ในเวลาเดียวกันเป็นไปตาม ABS, BV, DNV, GL, IEC, KR, LR, NK และมาตรฐานสากลอื่น ๆ และข้อกำหนดการจำแนกประเภทสังคมที่เกี่ยวข้อง
1. มอเตอร์เป็นไปตามมาตรฐานสากล Electrotechnical คณะกรรมการ IEC34, IEC72 มาตรฐานออสเตรเลีย AS1359-2 มาตรฐานอังกฤษ BS4999-5000 มาตรฐานเยอรมัน Din42673 สอดคล้องกับเครื่องหมายยุโรป "CE" ขอชุมชนสอดคล้องกับ GB755 (idt IEC 60034-1, GB10069 Neq IEC 60034-9, Q / JBQS282, มอเตอร์ประสิทธิภาพสูงเสียงรบกวนต่ำ, การสั่นสะเทือนต่ำ, ผ่านการออกแบบที่เหมาะสมและการปรับปรุงงานฝีมือ, มอเตอร์ซีรีย์ M2QA-H ในเสียง, การสั่นสะเทือนลดลงอย่างมากและประสบความสำเร็จระดับสากล . ระดับการป้องกันที่มีประสิทธิภาพสูงระดับการป้องกันการออกแบบมาตรฐานของมอเตอร์ IP55 ตามความต้องการของลูกค้าเพื่อให้ระดับการป้องกันที่สูงขึ้นมันเหมาะสำหรับแรงดันไฟฟ้ากว้างการออกแบบของมอเตอร์จะใช้การเปลี่ยนแปลงแรงดันไฟฟ้าของภูมิภาคต่าง ๆ เข้าบัญชีเพื่อ มอเตอร์สามารถใช้งานได้ในหลายภูมิภาคและสามารถรับประกันประสิทธิภาพการทำงานของผู้ใช้ได้เกรดฉนวนเพิ่มขึ้นและอายุการใช้งานของมอเตอร์ยาวนานขึ้น d มอเตอร์มาตรฐานใช้โครงสร้างฉนวน F เกรดดังนั้นอายุการใช้งานของมอเตอร์และความน่าเชื่อถือของมอเตอร์จะเพิ่มขึ้น มอเตอร์ประสิทธิภาพสูงใช้การออกแบบการปรับให้เหมาะสมมีประสิทธิภาพสูงอาจให้ผลการอนุรักษ์พลังงานที่น่าทึ่ง 3, มอเตอร์เกียร์สามารถลูกรอกสายพานเกียร์เดือยหรือไดรฟ์ coupling ยืดหยุ่น 4. พื้นผิวของขดลวดและชิ้นส่วนโลหะของมอเตอร์ได้รับการทาสีและรับการรักษาตามความต้องการของมอเตอร์ความร้อนใต้พิภพ มอเตอร์มีประสิทธิภาพที่ดีในการป้องกันความชื้นป้องกันเชื้อราและป้องกันหมอกเกลือหลังจากการทาสีและการรักษาพิเศษ เงื่อนไขการบริการ: ระดับความสูง 0M อุณหภูมิวงแหวนใน -25 ° c-50 ° C ความชื้นสัมพัทธ์อากาศ: ไม่เกิน 95% การควบแน่น: หมอกไอน้ำ: หมอกไอน้ำมัน: แม่พิมพ์: อิมแพ็ค: การสั่นสะเทือน: 22.5 องศาเอียง: แรงดันความถี่และโหมด การดำเนินงานโหมด 380V (50HZ) 440V (60HZ): แบริ่งต่อเนื่อง (S1): แบริ่ง NSK ญี่ปุ่นหากผู้ใช้ต้องการแรงดันไฟฟ้าเฉพาะงานสามารถจัดหาตามความต้องการพิเศษ

มอเตอร์ความถี่แปรผันหมายถึงมอเตอร์ที่ทำงานอย่างต่อเนื่องภายใต้สภาพแวดล้อมมาตรฐานที่มีโหลด 100% ในช่วงความเร็ว 10% ถึง 100% และการเพิ่มขึ้นของอุณหภูมิไม่เกินค่าที่อนุญาตให้ทำการสอบเทียบ
ด้วยการพัฒนาอย่างรวดเร็วของเทคโนโลยีอิเล็กทรอนิกส์กำลังและอุปกรณ์สารกึ่งตัวนำใหม่เทคโนโลยีการควบคุมความเร็ว ac ได้รับการปรับปรุงและปรับปรุงอย่างต่อเนื่องและอินเวอร์เตอร์ที่ได้รับการปรับปรุงให้ดีขึ้นด้วยรูปคลื่นเอาต์พุตที่ดีอัตราส่วนประสิทธิภาพที่ยอดเยี่ยมในเครื่อง ac ตัวอย่างเช่นเหล็กที่ใช้สำหรับกลิ้งมอเตอร์ขนาดใหญ่และมอเตอร์ไฟฟ้าขนาดกลางและขนาดเล็กทางรถไฟและทางรถไฟในเมืองด้วยมอเตอร์ฉุดลิฟท์อุปกรณ์ยกตู้คอนเทนเนอร์พร้อมมอเตอร์ยกปั๊มน้ำและพัดลมพร้อมมอเตอร์คอมเพรสเซอร์เครื่องใช้ในบ้านต้องใช้ มอเตอร์ปรับความเร็วรอบตัวแปร ac และได้รับผลดี [1] การใช้มอเตอร์ควบคุมความเร็ว ac ตัวแปรความถี่มีข้อดีที่ชัดเจนกว่ามอเตอร์ควบคุมความเร็ว dc:
(1) การควบคุมความเร็วง่ายและประหยัดพลังงาน
(2) โครงสร้างมอเตอร์ ac ง่ายขนาดเล็กความเฉื่อยขนาดเล็กต้นทุนต่ำบำรุงรักษาง่ายทนทาน
(3) กำลังการผลิตสามารถขยายเพื่อให้บรรลุความเร็วสูงและการดำเนินงานแรงดันสูง
(4) การเริ่มต้นที่นุ่มนวลและการเบรกอย่างรวดเร็วสามารถรับรู้ได้
(5) ไม่มีประกายไฟ, ระเบิด, การปรับตัวที่แข็งแกร่งกับสภาพแวดล้อม [1]
ในช่วงไม่กี่ปีที่ผ่านมาอุปกรณ์ไดรฟ์ที่ควบคุมความเร็วตัวแปรได้พัฒนาขึ้นที่อัตราการเติบโต 13% -16% ต่อปีและได้เปลี่ยนอุปกรณ์ไดรฟ์ที่ควบคุมความเร็ว dc เป็นส่วนใหญ่ เนื่องจากมอเตอร์อะซิงโครนัสทั่วไปซึ่งทำงานกับความถี่คงที่และแหล่งจ่ายแรงดันไฟฟ้าคงที่มีข้อ จำกัด อย่างมากเมื่อใช้กับระบบควบคุมความเร็วความถี่ตัวแปรมอเตอร์ ac ความถี่ตัวแปรพิเศษซึ่งออกแบบตามโอกาสการใช้งานและความต้องการใช้งานได้ถูก การพัฒนาในต่างประเทศ ตัวอย่างเช่นมีมอเตอร์สำหรับเสียงรบกวนต่ำและการสั่นสะเทือนต่ำมอเตอร์สำหรับการปรับปรุงลักษณะแรงบิดความเร็วต่ำมอเตอร์สำหรับความเร็วสูงมอเตอร์ที่มีเครื่องกำเนิดความเร็ววัดและมอเตอร์ควบคุมเวกเตอร์ ฯลฯ [1]
การแก้ไขหลักการก่อสร้าง
เมื่ออัตราการลื่นเปลี่ยนไปเล็กน้อยความเร็วจะแปรผันตามความถี่จะเห็นได้ว่าการเปลี่ยนความถี่พลังงานสามารถเปลี่ยนความเร็วของมอเตอร์แบบอะซิงโครนัสได้ ในการควบคุมความเร็วในการแปลงความถี่หวังว่าฟลักซ์แม่เหล็กหลักยังคงไม่เปลี่ยนแปลง หากฟลักซ์แม่เหล็กหลักมีขนาดใหญ่กว่าฟลักซ์แม่เหล็กในการทำงานตามปกติวงจรแม่เหล็กจะทำงานเกินปกติและกระแสกระตุ้นจะเพิ่มขึ้นและตัวประกอบกำลังจะลดลง หากฟลักซ์แม่เหล็กหลักน้อยกว่าฟลักซ์แม่เหล็กในการทำงานปกติแรงบิดของมอเตอร์จะลดลง [1]
บรรณาธิการกระบวนการพัฒนา
ระบบแปลงความถี่มอเตอร์ปัจจุบันส่วนใหญ่จะใช้ระบบควบคุม V / F คงที่ระบบควบคุมการแปลงความถี่นี้มีลักษณะโครงสร้างที่เรียบง่ายผลิตราคาถูก ระบบนี้ใช้กันอย่างแพร่หลายในพัดลมและอื่น ๆ ขนาดใหญ่และสำหรับประสิทธิภาพแบบไดนามิกของระบบไม่ต้องการสูงมาก ระบบนี้เป็นระบบควบคุมวงเปิดทั่วไปซึ่งสามารถตอบสนองความต้องการความเร็วที่ราบรื่นของมอเตอร์ส่วนใหญ่ แต่สำหรับประสิทธิภาพแบบไดนามิกและแบบคงที่มี จำกัด ไม่สามารถนำไปใช้กับความต้องการประสิทธิภาพแบบไดนามิกและแบบคงที่ที่เข้มงวดมากขึ้น เพื่อให้บรรลุกฎระเบียบแบบไดนามิกและแบบคงที่ประสิทธิภาพสูงเราสามารถใช้ระบบควบคุมวงปิดเพื่อให้บรรลุเท่านั้น ดังนั้นนักวิจัยบางคนหยิบยกการควบคุมความถี่สลิปวงปิดของโหมดการควบคุมความเร็วมอเตอร์วิธีการปรับความเร็วนี้เพื่อให้เกิดประสิทธิภาพสูงในความเร็วคงที่และแบบไดนามิก แต่ระบบเพียงถูกนำมาใช้ในความเร็วมอเตอร์ช้าเพราะเมื่อความเร็ว ของมอเตอร์สูงกว่าระบบจะไม่บรรลุวัตถุประสงค์ของการประหยัดพลังงานไฟฟ้านอกจากนี้ยังสามารถทำให้มอเตอร์ชั่วคราวปัจจุบันอย่างมากทำให้แรงบิดมอเตอร์เปลี่ยนทันที ดังนั้นเพื่อให้บรรลุประสิทธิภาพแบบไดนามิกและแบบคงที่สูงในความเร็วสูงเพียงเพื่อแก้ปัญหาของกระแสชั่วคราวที่สร้างขึ้นโดยมอเตอร์เพียงเพื่อแก้ปัญหานี้อย่างสมเหตุสมผลเราสามารถพัฒนาเทคโนโลยีการควบคุมการประหยัดพลังงานมอเตอร์ความถี่ดีกว่า [2]
ตัวแก้ไขคุณสมบัติหลัก
มอเตอร์พิเศษแปลงความถี่มีลักษณะดังต่อไปนี้:
การออกแบบที่เพิ่มขึ้นอุณหภูมิ B คลาสการผลิตฉนวนกันความร้อนคลาส F การใช้วัสดุฉนวนโพลีเมอร์และความดันสูญญากาศในกระบวนการผลิตและการใช้โครงสร้างฉนวนพิเศษเพื่อให้แรงดันไฟฟ้าฉนวนกันความร้อนที่คดเคี้ยวและความแข็งแรงเชิงกลได้รับการปรับปรุงอย่างมากพอที่จะมีคุณสมบัติสำหรับการทำงานของมอเตอร์ความเร็วสูง ความถี่สูงทำให้กระแสไฟฟ้าช็อตและความเสียหายของฉนวนกับฉนวน
คุณภาพสมดุลสูงระดับการสั่นสะเทือนสำหรับคลาส R (ระดับการลดการสั่นสะเทือน) การประมวลผลชิ้นส่วนเครื่องจักรความแม่นยำสูงและการใช้ตลับลูกปืนความแม่นยำสูงพิเศษสามารถทำงานด้วยความเร็วสูง
ระบบระบายอากาศบังคับและการกระจายความร้อนพัดลมแกนนำเข้าทั้งหมดเงียบพิเศษชีวิตสูงลมแรง ตรวจสอบให้แน่ใจมอเตอร์ที่ความเร็วใด ๆ รับการกระจายความร้อนที่มีประสิทธิภาพสามารถบรรลุการดำเนินงานระยะยาวความเร็วสูงหรือความเร็วต่ำ
มอเตอร์ซีรีย์ YP ที่ออกแบบโดยซอฟต์แวร์ AMCAD มีการควบคุมความเร็วที่หลากหลายและคุณภาพการออกแบบที่สูงขึ้นเมื่อเทียบกับมอเตอร์แปลงความถี่แบบดั้งเดิม ด้วยแรงบิดคงที่และลักษณะการควบคุมความเร็วพลังงานที่หลากหลายการควบคุมความเร็วมีเสถียรภาพไม่มีแรงบิดระลอก
มีการจับคู่พารามิเตอร์ที่ดีกับตัวแปลงความถี่ทุกชนิดและสามารถรับแรงบิดเต็มความเร็วเป็นศูนย์แรงบิดขนาดใหญ่ความถี่ต่ำการควบคุมความเร็วความแม่นยำสูงการควบคุมตำแหน่งและการควบคุมการตอบสนองแบบไดนามิกที่รวดเร็ว YP ชุดมอเตอร์ความถี่ตัวแปรพิเศษที่สามารถใช้ในการเตรียมเบรกอุปทานตัวเข้ารหัสเพื่อให้สามารถหยุดได้อย่างแม่นยำและผ่านการควบคุมวงปิดความเร็วเพื่อให้เกิดการควบคุมความเร็วที่มีความแม่นยำสูง
การควบคุมที่แม่นยำของการควบคุมความเร็ว stepless ความเร็วต่ำที่แม่นยำทำได้โดยใช้ "ตัวลด + อินเวอร์เตอร์มอเตอร์พิเศษ + ตัวเข้ารหัส + อินเวอร์เตอร์" มอเตอร์ชนิดพิเศษสำหรับการแปลงความถี่ YP มีความเป็นสากลที่ดีขนาดการติดตั้งเป็นไปตามมาตรฐาน IEC และสามารถใช้แทนกันได้กับมอเตอร์มาตรฐานทั่วไป
มอเตอร์แก้ไขความเสียหายฉนวนกันความร้อน
ในความนิยมและการประยุกต์ใช้มอเตอร์แปลงความถี่ ac มอเตอร์ควบคุมความเร็วในการแปลงความถี่ ac จำนวนมากได้รับความเสียหายจากฉนวนเริ่มแรก การใช้งานมอเตอร์แปลงความถี่ ac จำนวนมากอายุการใช้งานเพียง 1 ~ 2 ปีบางเพียงไม่กี่สัปดาห์แม้ในการทดสอบการทำงานของมอเตอร์ฉนวนกันความร้อนเสียหายและมักจะเกิดขึ้นระหว่างฉนวนกันความร้อนเปลี่ยนซึ่งทำให้ไปข้างหน้าหัวข้อใหม่สำหรับเทคโนโลยีฉนวนยนต์ การปฏิบัติได้พิสูจน์แล้วว่าทฤษฎีการออกแบบฉนวนของมอเตอร์ภายใต้แรงดันไฟฟ้าความถี่คลื่นไซน์ที่พัฒนาขึ้นในช่วงไม่กี่ทศวรรษที่ผ่านมาไม่สามารถนำไปใช้กับมอเตอร์ควบคุมความเร็วความถี่ตัวแปร ac ได้ มีความจำเป็นต้องศึกษากลไกความเสียหายของฉนวนของมอเตอร์แปลงความถี่สร้างทฤษฎีพื้นฐานของการออกแบบฉนวนของมอเตอร์แปลงความถี่ ac และสร้างมาตรฐานอุตสาหกรรมของมอเตอร์แปลงความถี่ ac
ความเสียหายต่อลวดแม่เหล็กไฟฟ้า
1.1 การคายประจุและพื้นที่บางส่วน
ปัจจุบัน IGB T (diode gate diode gate) PWM (ความกว้างพัลส์มมและวัดความกว้างพัลส์) ใช้เพื่อควบคุมมอเตอร์ ac ช่วงพลังงานประมาณ 0.75 ~ 500kW เทคโนโลยี IGBT สามารถให้เวลาเพิ่มขึ้นอย่างรวดเร็วในเวลาสั้น ๆ เวลาเพิ่มขึ้นใน 20 ~ 100 วินาทีพัลส์ไฟฟ้าที่ได้จะมีความถี่สวิตชิ่งสูงมากถึง 20 KHZ เมื่อแรงดันขอบเพิ่มขึ้นอย่างรวดเร็วถูกนำมาใช้จากอินเวอร์เตอร์ไปยังจุดสิ้นสุดมอเตอร์คลื่นแรงดันไฟฟ้าสะท้อนจะถูกสร้างขึ้นเนื่องจากความไม่ตรงกันของอิมพีแดนซ์ระหว่างมอเตอร์และสายเคเบิล คลื่นสะท้อนกลับนี้กลับไปที่อินเวอร์เตอร์และเหนี่ยวนำคลื่นสะท้อนอีกอันหนึ่งเนื่องจากความไม่ตรงกันของความต้านทานระหว่างสายเคเบิลและตัวแปลงที่จะนำไปใช้กับคลื่นแรงดันไฟฟ้าเดิมจึงสร้างแรงดันสูงสุดที่ด้านหน้าคลื่นแรงดันไฟฟ้า แรงดันไฟฟ้าสูงสุดจะขึ้นอยู่กับเวลาที่เพิ่มขึ้นของแรงดันไฟฟ้าพัลส์และความยาวของสายเคเบิล [1]
โดยทั่วไปเมื่อความยาวของลวดเพิ่มขึ้นปลายทั้งสองของลวดจะเกิดแรงดันไฟฟ้าเกิน แอมพลิจูดของแรงดันไฟฟ้าเกินที่ปลายมอเตอร์เพิ่มขึ้นตามความยาวของสายเคเบิลและมีแนวโน้มที่จะอิ่มตัว อย่างไรก็ตามแรงดันเกินที่ปลายกำลังมีขนาดเล็กกว่าที่ปลายมอเตอร์และเกือบจะเป็นอิสระจากความยาวของสายเคเบิล ผลการวิจัยพบว่าแรงดันไฟฟ้าเกินถูกสร้างขึ้นที่ขอบเพิ่มขึ้นและลดลงของแรงดันไฟฟ้าและการสั่นของการลดทอนจะเกิดขึ้น มีสองชนิดของ PWM ในการขับสัญญาณพัลส์พัลส์หนึ่งคือความถี่การสลับ ความถี่การเกิดซ้ำของแรงดันไฟฟ้าสูงสุดเป็นสัดส่วนกับความถี่การสลับ อื่น ๆ คือความถี่พื้นฐานซึ่งควบคุมความเร็วของมอเตอร์โดยตรง ที่จุดเริ่มต้นของความถี่พื้นฐานแต่ละช่วงคลื่นพัลส์จะมีค่าเป็นบวกหรือลบ ในเวลานี้ฉนวนกันความร้อนของมอเตอร์จะอยู่ภายใต้แรงดันไฟฟ้าเต็มแอมพลิจูดสองเท่าของค่าแรงดันไฟฟ้าสูงสุด นอกจากนี้ในมอเตอร์สามเฟสที่ฝังอยู่กระจัดกระจายขั้วของแรงดันไฟฟ้าระหว่างสองรอบที่อยู่ติดกันของเฟสที่แตกต่างกันอาจแตกต่างกันและการกระโดดของแรงดันไฟฟ้าเต็มแอมพลิจูดอาจเป็นสองเท่าของแรงดันไฟฟ้าสูงสุด ตามการทดสอบรูปคลื่นแรงดันเอาท์พุทของตัวแปลง PWM ในระบบ ac ของ 380 / 480v, แรงดันสูงสุดที่วัดได้ที่ปลายมอเตอร์คือ 1.2 ~ 1.5kv ในขณะที่ในระบบ ac ของ 576 / 600v, แรงดันไฟฟ้าสูงสุดที่วัดได้ ถึง 1.6 ~ 1.8kv เห็นได้ชัดว่าพื้นผิวมีการคายประจุบางส่วนเกิดขึ้นระหว่างขดลวดภายใต้แรงดันไฟฟ้าเต็มคลื่น เนื่องจากการแตกตัวเป็นไอออนทำให้เกิดประจุในช่องว่างในอากาศทำให้เกิดสนามไฟฟ้าเหนี่ยวนำที่ตรงกันข้ามกับสนามไฟฟ้าที่ใช้ เมื่อแรงดันไฟฟ้ามีการเปลี่ยนแปลงสนามไฟฟ้าย้อนกลับนี้อยู่ในทิศทางเดียวกับสนามไฟฟ้าที่ใช้ ด้วยวิธีนี้สนามไฟฟ้าที่สูงขึ้นจะถูกสร้างขึ้นซึ่งจะนำไปสู่การเพิ่มจำนวนของการปล่อยบางส่วนและในที่สุดก็นำไปสู่การสลาย การทดสอบแสดงให้เห็นว่าไฟฟ้าช็อตที่ทำหน้าที่เป็นฉนวนระหว่างรอบเหล่านี้ขึ้นอยู่กับประสิทธิภาพเฉพาะของสายไฟและเวลาที่เพิ่มขึ้นของกระแสไดรฟ์ PWM หากเวลาที่เพิ่มขึ้นน้อยกว่า 0.1 วินาที 80% ของศักยภาพจะถูกเพิ่มในสองรอบแรกของขดลวดนั่นคือเวลาที่เพิ่มขึ้นที่สั้นลงคือเวลาที่เพิ่มขึ้นของไฟฟ้าช็อตและชีวิตของ ฉนวนระหว่างจุดเปลี่ยน [1]
1.2 การสูญเสียและความร้อนปานกลาง
เมื่อ E เกินค่าวิกฤตของฉนวนการสูญเสียอิเล็กทริกจะเพิ่มขึ้นอย่างรวดเร็ว เมื่อความถี่เพิ่มขึ้นการคายประจุบางส่วนจะเพิ่มขึ้นส่งผลให้เกิดความร้อนซึ่งทำให้เกิดกระแสไฟรั่วมากขึ้นซึ่งทำให้ Ni เพิ่มขึ้นเร็วขึ้นนั่นคืออุณหภูมิของมอเตอร์เพิ่มขึ้นและอายุของฉนวนเร็วขึ้น ในระยะสั้นมันเป็นเพราะการปล่อยบางส่วนข้างต้นความร้อนอิเล็กทริกเหนี่ยวนำค่าใช้จ่ายในพื้นที่และปัจจัยอื่น ๆ ที่ทำให้เกิดความเสียหายก่อนวัยอันควรของสายแม่เหล็กไฟฟ้าในมอเตอร์ความถี่ตัวแปร [1]
ความเสียหายต่อฉนวนหลัก, ฉนวนกันความร้อนเฟสและสีฉนวน
ดังที่ได้กล่าวมาแล้วการใช้แหล่งจ่ายไฟความถี่ตัวแปร PWM เพิ่มความกว้างของแรงดันไฟฟ้าสั่นที่ขั้วของมอเตอร์ความถี่ตัวแปร ดังนั้นฉนวนหลักเฟสฉนวนและสีฉนวนของมอเตอร์จึงขึ้นกับความเข้มของสนามไฟฟ้าที่สูงขึ้น ตามการทดสอบเนื่องจากอิทธิพลที่ครอบคลุมของอินเวอร์เตอร์แรงดันเอาท์พุทเวลาเพิ่มขึ้นความยาวสายเคเบิลและความถี่ในการสลับแรงดันสูงสุดของขั้วข้างต้นสามารถเกิน 3kV นอกจากนี้เมื่อมีการคายประจุบางส่วนเกิดขึ้นระหว่างขดลวดของมอเตอร์พลังงานไฟฟ้าที่เก็บโดยการกระจายความจุในฉนวนจะถูกเปลี่ยนเป็นความร้อนรังสีพลังงานกลและเคมีเพื่อลดระบบฉนวนทั้งหมดลดการสลาย แรงดันไฟฟ้าของฉนวนกันความร้อนและในที่สุดก็นำไปสู่การสลายของระบบฉนวนกันความร้อน










































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}